RoTao的IPSS(独立推进/制动,车桥调节,转向和悬架)轮组是为EV(电动车辆)滑板平台设计的。它是一种高度模块化、低非簧载质量的和电控的通用车轮单元,用于制造未来的车辆。
仅出于其机械简单性的考量,将电动机直接附接至车轮并将车轮部附接至平坦的底盘似乎是显而易见的选择。无需任何常规的变速箱和机械联动装置,电动机便可以直接和单独地在车轮上产生扭矩。模块化设计提供了灵活性和成本效益。但是,一些带有轮毂电机的设计会增加更大的簧下质量。通常,较高的簧下质量会导致行驶时更加颠簸和嘈杂,并可能导致车轮控制问题。它还会缩短悬架弹簧的使用寿命。因此,许多汽车设计师认为直接驱动电动机是一种固有的问题。
轮驱动的自适应优化控制(TO)是这样一种机制,车辆的中央控制器根据每个车轮的潜在道路和交通状况分别向车轮发送命令。这些命令包括推进、制动、轴调节、转向和悬架的操控,以动态、协调和协作地实现实时反应。这些操作的组合实现了优化的性能和功能。
在面向需求的众多应用中,IPSS设计可以提供独特的竞争优势。由于设计上面对困难和问题,以前的大多数汽车制造商对它的优势视而不见。随着技术发展,现在该是带来低非簧载质量、牵引力自适应优化控制和高度模块化,具有独立推进、制动、转向、尤其是轴调节功能的近轮电动机的时候了。
该设计的目的是实现轮驱动的自适应优化控制(TO),该控制包括但不限于以下方面:1)较低的非簧载质量,从而具有更好的路面抓地力和行驶质量; 2)更安全,更快,更锋利的转弯能力–变型转弯; 3)自适应避障; 4)一系列新的,独特的和高级的车辆运动功能,例如平行驾驶或停车,动态轮距调节、转矩矢量、无级降低车身、真正的全轮驱动(WD)和楔形制动。此外,它还可以通过延长车轴使紧凑型车辆达到RoTao高架轨道的标准宽度。
该机构至少包括以下部分:(1)车轴调整,可动态控制轮距。它允许通过电动线性致动器向外或向内伸缩轮轴。由于没有物理轴连接每对车轮,因此独立的轴一起工作以形成虚拟轴和轮距。(2)独立的推进系统由靠近并垂直于轮轴的电动机驱动,通过花键轴,锥齿轮减速器和行星齿轮减速器控制车轮的前进和后退运动。(3)轮组的低轮廓转向系统包括一对止推轴承和转向齿轮以及一个电动机。转向系统的设计可实现极低的外形,不需要在车轮上方增加任何高度。(4)每个车轮单元还具有位于相应轮毂内的独立悬挂系统。悬架采用阻尼机构,该机构利用液压缸和弹簧吸收在不平坦表面上行驶时垂直运动产生的冲击。
前述电动机通过电线连接至主电池;主电池根据驾驶员的命令和输入将电能立即传输到电动机。通过用电控代替一些机械部件,可以减轻车辆的重量,并且使车辆更容易控制。此外,所有车轮单元协调工作,确保了通用的控制需求。由于车轮单元是独立的,因此每个独立的系统都以不同的速率运行。可能的功用包括但不限于:(1)电动线性执行器为调节轮距而推或拉每个轮及轮罩; (2)转向时各单元的旋转角度; (3)推进电机产生多少扭力;(4)车身在急转弯(例如变换转弯)期间倾斜时每个悬架的高度,等等。
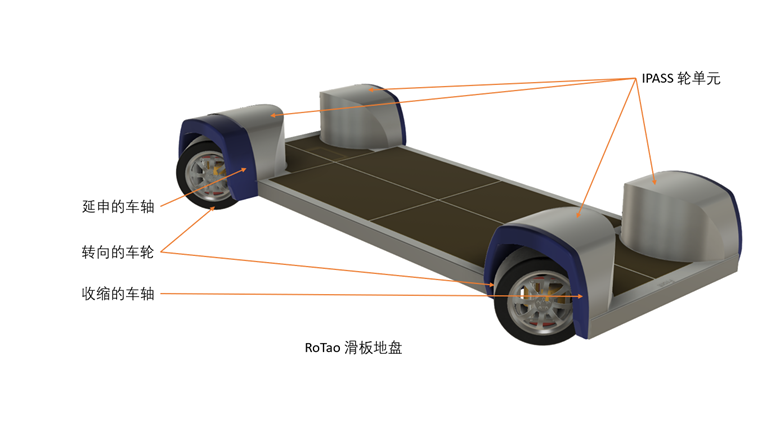
本文中的图表述了配备4个IPSS单元的EV滑板底盘。对于重型车辆,可以使用6、8或更多个单元来构建多轴底盘。由于全轮转向能力,它使转向的摩擦更少、更精确、转弯半径更小。 对于不同要求,可以省略IPSS单元的一项或多项功能。 比如大型车辆可能不需要轴延伸功能,因此,为了降低成本,车辆可能不需要全轮驱动功能、全轮可转向功能或主动悬架功能。
RoTao的IPSS方法可为客户带来多种好处,包括成本效率、车辆设计自由度、更快的开发时间、更高的可操纵性、DS兼容性、降低了的维护成本以及符合RoTao高架轨道标准。